Article summary
In my dabbles into game development, I’ve loved the expressiveness of Ruby, but longed for the performance of a compiled language. (Anyone else in that boat?) I recently heard about a newer language that promised “The beauty of Ruby with the speed of C.” Its name is Crystal.
Crystal has been around since 2013 and made its first official release in 2014. Its standard library is quite complete and well-documented. Crystal is statically typed and has support for macros, type inference, union types, and a concurrency model based off Go (fibers and channels)—and best of all, it compiles down to native code.
It also comes with its own package manager, Shards (get it? crystal… shards) that allows for dependency tracking. Since it’s based on LLVM, it allows the use of some neat tools (like Instruments on OS X).
From its website, the primary design goals are to:
- Have a similar syntax to Ruby (not 100% compatible)
- Be statically type–checked with good type inference
- Have compile-time evaluation/code generation
- Compile to native code
To play around with Crystal, I decided to port over an A* path finding algorithm from Ruby to Crystal. This seemed like a large enough piece of code to get my feet wet in Crystal and allow meaningful benchmarks compared to Ruby. I’ve attached both versions of the code at the bottom of this post, but here are the main gotchas that I encountered while porting my A* code to Crystal:
- Types. Duh. This was not as bad as I thought it’d be. The type inference works well. I only had to specify a handful of types.
- Nil checks. This is a huge win for Crystal. If a var can be nil, the compiler enforces that you are nil-safe and don’t use any methods on a nil.
- The need to use double quotes for all strings.
- Named args syntax (all args are available as named args without the colon needed in Ruby).
class << selfis not allowed. Usedef self.foo.attr_accessorbecomesproperty.- I ran into a bug that was already reported about nil block params. A simple workaround is to use method overloading.
- Block arg splatting is not implicit and requires parens.
STDOUT.writedoes not exist; change toSTDOUT.print. The Crystal folks really hate on method aliases.
There are lots of other little inconsistencies with Ruby, but the Crystal team has documented them and their rationale on their website.
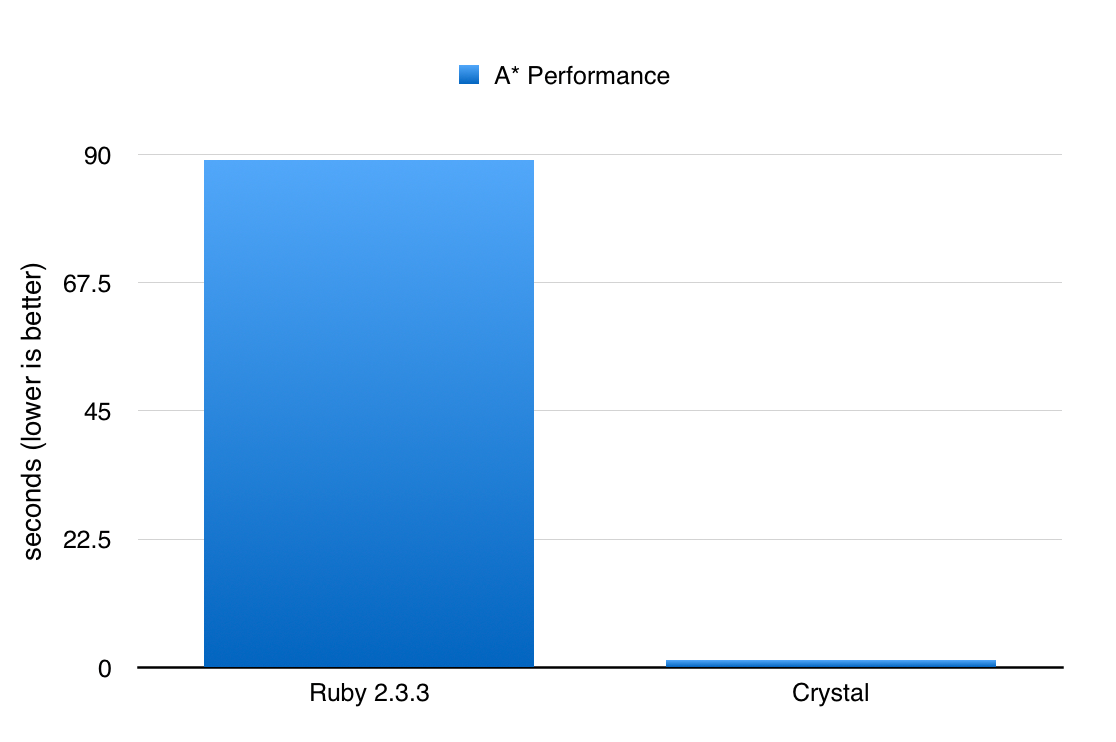
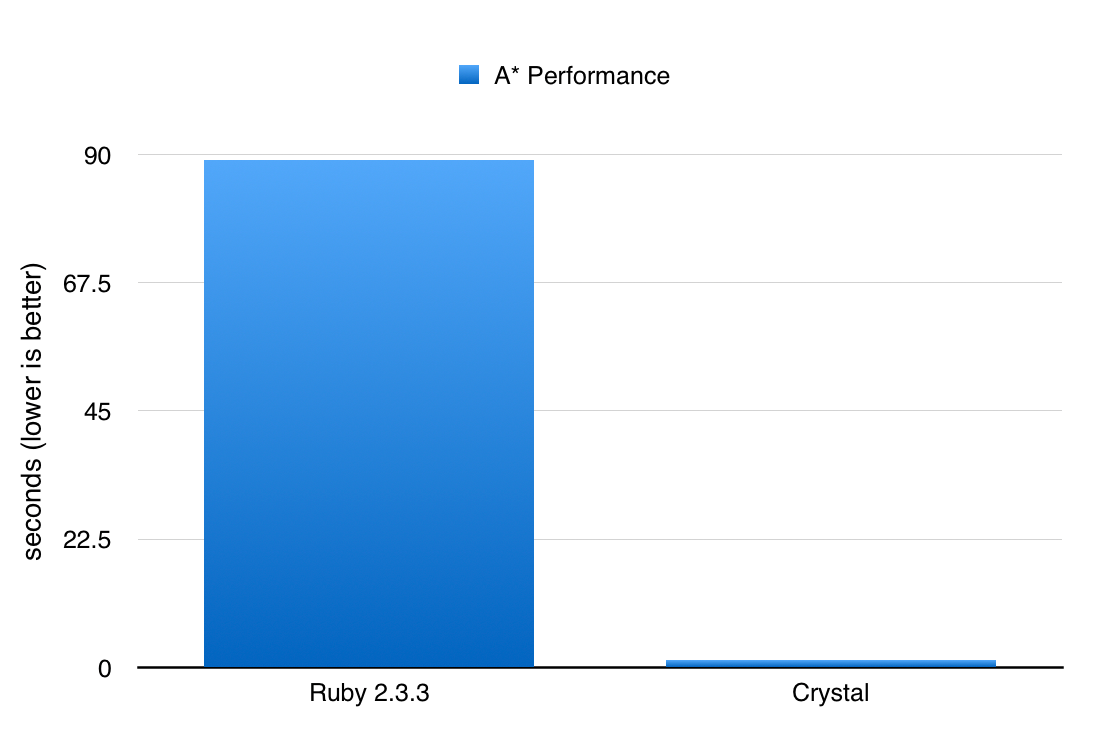
Performance
To test my completely unoptimized version of A*, I used a 180x50 grid to generate 1000 paths in both Ruby and Crystal (compiled with --release flag). Over a handful of manual runs on my MacBookPro, Crystal ran almost 70 times faster!
Takeaways
I'll definitely keep an eye on Crystal as it comes out of its beta phase. The syntax is familiar and easy to pick up, and there's good documentation. The performance is great (especially compared to Ruby). Static types and compiled native code are big wins. Once they get Windows support, I'll definitely be looking into Crystal for my hobby game development.
A* Snippet in Ruby
# Ideal choice of fixed-point equivalent to 1.0 that can almost perfectly represent sqrt(2) and (sqrt(2) - 1) in whole numbers
# 1.000000000 = 2378
# 0.414213624 = 985 / 2378
# 1.414213625 = 3363 / 2378
# 1.414213562 = Actual sqrt(2)
# 0.00000006252 = Difference between actual sqrt(2) and fixed-point sqrt(2)
COST_STRAIGHT = 2378
COST_DIAG = 3363
class Node
include Comparable
attr_accessor :location, :cost, :dist, :estimated_total, :parent, :state
def initialize(location:,cost:,dist:,estimated_total:,parent:nil)
@location = location
@cost = cost
@dist = dist
@estimated_total = estimated_total
@parent = parent
end
def <=>(b)
a = self
if a.estimated_total < b.estimated_total
return -1
elsif a.estimated_total > b.estimated_total
return 1
else
0
end
end
def ==(other)
return false if other.nil? || !other.is_a?(Node)
@location == other.location
end
end
NEIGHBORS = [
[1,0,COST_STRAIGHT],
[-1,0,COST_STRAIGHT],
[0,1,COST_STRAIGHT],
[0,-1,COST_STRAIGHT],
[1,1,COST_DIAG],
[1,-1,COST_DIAG],
[-1,1,COST_DIAG],
[-1,-1,COST_DIAG],
]
class UnsortedPriorityQueue
def initialize
@array = []
end
def <<(item)
@array << item
end
def include?(item)
@array.include? item
end
def empty?
@array.empty?
end
def pop_smallest
@array.delete @array.min_by(&:estimated_total)
end
end
class AStar
class << self
def find_path(board, from, to)
h = board.size
w = board.first.size
nodes = {}
open = UnsortedPriorityQueue.new
fast_stack = []
dist = heuristic(from, to)
node = Node.new(location: from, cost: 0, dist: dist, estimated_total: dist)
open << node
until (fast_stack.empty? && open.empty?)
current = fast_stack.pop
current ||= open.pop_smallest
nodes[current.location] ||= current
if current.location == to
return nodes, build_path(current)
else
current.state = :closed
NEIGHBORS.each do |dx,dy,travel_cost|
n_loc = [current.location[0]+dx, current.location[1]+dy]
next if blocked?(board, n_loc)
n_node = nodes[n_loc]
next if n_node && n_node.state == :closed
dist = heuristic(n_loc, to)
cost = current.cost + travel_cost
estimated_total = cost + dist
if n_node
n_node = nodes[n_loc]
next if estimated_total >= n_node.estimated_total
n_node.cost = cost
n_node.estimated_total = estimated_total
n_node.parent = current
else
n_node = Node.new(location: n_loc, cost: cost, dist: dist,
estimated_total: estimated_total, parent: current)
nodes[n_node.location] = n_node
n_node.state = :open
if n_node.estimated_total <= current.estimated_total
fast_stack << n_node
else
open << n_node
end
end
end
end
end
return nodes, nil
end
def build_path(node)
[].tap do |path|
while node.parent
path.unshift node.location
node = node.parent
end
end
end
def blocked?(board, loc)
loc[1] > (board.size-1) || loc[1] < 0 ||
loc[0] > (board[0].size-1) || loc[0] < 0 ||
board[loc[1]][loc[0]] > 0
end
def heuristic(from, to)
dx = (to[0]-from[0]).abs
dy = (to[1]-from[1]).abs
COST_STRAIGHT * (dx + dy) + (COST_DIAG - 2 * COST_STRAIGHT) * min(dx,dy)
end
def max(a,b)
a < b ? b : a
end
def min(a,b)
a > b ? b : a
end
end
end
def generate_board(w,h,density)
board = []
h.times do
board << ([0]*w)
end
(w*h*density).round.times do
board[rand(h)][rand(w)] = 1
end
wall_i = (h/2).round
w.times do |i|
board[wall_i][i] = 1 unless i == 0 || i == w-1
end
wall_j = (w/2).round
h.times do |j|
board[j][wall_j] = 1 unless j == 0 || j == h-1
end
board
end
def run_scenario(w,h,density)
if ARGV[0]
srand ARGV[0].to_i
end
puts "generating board"
board = generate_board w, h, density
from = [rand(w),rand(h)]
to = [rand(w),rand(h)]
board[from[1]][from[0]] = 0
board[to[1]][to[0]] = 0
puts "looking...#{from.inspect} -> #{to.inspect}"
path = nil
nodes = nil
1000.times do
nodes, path = AStar.find_path(board, from, to) || []
end
puts path.inspect
if ARGV[1]
board.each.with_index do |row, y|
puts
row.each.with_index do |val, x|
if val == 1
STDOUT.write "\u{2588}"
else
loc = [x,y]
if loc == from
STDOUT.write 'S'
elsif loc == to
STDOUT.write "X"
elsif path.include?(loc)
STDOUT.write "\u{25ab}"
else
if(nodes[loc] && nodes[loc].state == :closed)
STDOUT.write "\u{25a8}"
else
STDOUT.write "\u{2592}"
end
end
end
end
end
puts
end
end
run_scenario 180, 50, 0.05
A* Snippet in Crystal
COST_STRAIGHT = 2378
COST_DIAG = 3363
class Node
include Comparable(Node)
property :location, :cost, :dist, :estimated_total, :parent, :state
def initialize(location : Array(Int32),cost : Int32 ,dist : Int32, estimated_total : Int32, parent : (Node|Nil)=nil)
@location = location
@cost = cost
@dist = dist
@estimated_total = estimated_total.as(Int32)
@state = :unknown
@parent = parent
end
def <=>(b)
a = self
if a.estimated_total < b.estimated_total
return -1
elsif a.estimated_total > b.estimated_total
return 1
else
0
end
end
def ==(other)
return false if other.nil?
@location == other.location
end
end
NEIGHBORS = [
[1,0,COST_STRAIGHT],
[-1,0,COST_STRAIGHT],
[0,1,COST_STRAIGHT],
[0,-1,COST_STRAIGHT],
[1,1,COST_DIAG],
[1,-1,COST_DIAG],
[-1,1,COST_DIAG],
[-1,-1,COST_DIAG],
]
class UnsortedPriorityQueue
def initialize
@array = [] of Node
end
def <<(item)
@array << item
end
def include?(item)
@array.includes? item
end
def empty?
@array.empty?
end
def pop_smallest
# puts "min #{@array.min_by(&:estimated_total).location.inspect}"
@array.delete @array.min_by{|n|n.estimated_total}
end
end
class AStar
def self.find_path(board, from, to)
h = board.size
w = board.first.size
nodes = {} of Array(Int32) => Node
open = UnsortedPriorityQueue.new #Heap.new
fast_stack = [] of Node
dist = heuristic(from, to)
node = Node.new(location: from, cost: 0, dist: dist, estimated_total: dist)
open << node
until fast_stack.empty? && open.empty?
current = nil
current = fast_stack.pop unless fast_stack.empty?
current ||= open.pop_smallest
if current && !nodes.has_key? current.location
nodes[current.location] = current
end
if current && current.location == to
return nodes, build_path(current)
elsif current
current.state = :closed
NEIGHBORS.each do |(dx,dy,travel_cost)|
n_loc = [current.location[0]+dx, current.location[1]+dy]
next if blocked?(board, n_loc)
n_node = nodes[n_loc] if nodes.has_key? n_loc
next if n_node && n_node.state == :closed
dist = heuristic(n_loc, to)
cost = current.cost + travel_cost
estimated_total = cost + dist
if n_node
n_node = nodes[n_loc]
next if estimated_total >= n_node.estimated_total
n_node.cost = cost
n_node.estimated_total = estimated_total
n_node.parent = current
else
n_node = Node.new(location: n_loc, cost: cost, dist: dist,
estimated_total: estimated_total, parent: current)
nodes[n_node.location] = n_node
n_node.state = :open
if n_node.estimated_total <= current.estimated_total
fast_stack << n_node
else
open << n_node
end
end
end
end
end
return nodes, nil
end
def self.build_path(node)
return if node.nil?
Array(Array(Int32)).new.tap do |path|
while node.parent
path.unshift node.location
node = node.parent.as(Node)
end
end
end
def self.blocked?(board, loc)
loc[1] > (board.size-1) || loc[1] < 0 ||
loc[0] > (board[0].size-1) || loc[0] < 0 ||
board[loc[1]][loc[0]] > 0
end
def self.heuristic(from, to)
dx = (to[0]-from[0]).abs
dy = (to[1]-from[1]).abs
COST_STRAIGHT * (dx + dy) + (COST_DIAG - 2 * COST_STRAIGHT) * min(dx,dy)
end
def self.max(a,b)
a < b ? b : a
end
def self.min(a,b)
a > b ? b : a
end
end
def generate_board(w,h,density)
board = Array(Array(Int32)).new
h.times do
board << ([0]*w)
end
(w*h*density).round.to_i.times do
board[rand(h)][rand(w)] = 1
end
wall_i = (h/2).round
w.times do |i|
board[wall_i][i] = 1 unless i == 0 || i == w-1
end
wall_j = (w/2).round
h.times do |j|
board[j][wall_j] = 1 unless j == 0 || j == h-1
end
board
end
def run_scenario(w,h,density)
if ARGV.size > 0
Random::DEFAULT.new_seed [ARGV[0].to_i]*4
end
puts "generating board"
board = generate_board w, h, density
from = [rand(w),rand(h)]
to = [rand(w),rand(h)]
board[from[1]][from[0]] = 0
board[to[1]][to[0]] = 0
puts "looking...#{from.inspect} -> #{to.inspect}"
path = nil
nodes = nil
1000.times do
nodes, path = AStar.find_path(board, from, to)
end
puts path.inspect
if ARGV.size > 1
board.each.with_index do |row, y|
puts
row.each.with_index do |val, x|
if val == 1
STDOUT.print "\u{2588}"
else
loc = [x,y]
if loc == from
STDOUT.print 'S'
elsif loc == to
STDOUT.print "X"
elsif path && path.includes?(loc)
STDOUT.print "\u{25ab}"
else
if(nodes && nodes.has_key?(loc) && nodes[loc] && nodes[loc].state == :closed)
STDOUT.print "\u{25a8}"
else
STDOUT.print "\u{2592}"
end
end
end
end
end
puts
end
end
run_scenario 180, 50, 0.05
“Once they get Windows support…”
Any chance you could give the game industry some support, and not make it a Microsoft-first world anymore? Its a rather circular argument, that “for good games, you need Windows,” since the only reason for that is developers developing a Windows-first world. Platform independence, FTW. Linux-first for the top score ;)
It’s not even a matter of making it “Microsoft-first”, it’s a matter of Windows being the most common desktop OS on the planet, and therefore it exists as a baseline requirement for a game to support in order to be viable on the market.
Thanks for the comment, Todd. While I entirely agree that Windows-first world is unfortunate, most of the game dev I do is for game jams (especially http://www.ludumdare.com/compo/). To get other people to play them and rate them, you need to either put out a windows build or a browser build.
So while I’ll definitely keep playing with Crystal, I won’t be switching over my game dev hobby until they get some form of Windows support.
>To get other people to play them and rate them, you need to either put out a windows build or a browser build.
Shawn did you see at Cocos2d-x game framework (that include Cocos2d-js)?
its a great Spider Monkey (browser in your therm) 2D framework (they also starts 3D development) that support not only Windows desktop but also Windows Phone, iOS, MacOS, Android, Linux.
Actually Cocos2d-x not support Ruby – only JavaScript, Lua, C++ – but it have very wide platform coverage.
I have seen some of the Cocos2d-x stuff. It looks really nice. I’m also interested in playing more with Love2D now that it can target Android / iOS.
BTW you can save some typing in your initialize method like this
class Person
def initialize(@name : String, @age = 0)
end
def printit
puts “#{@name} #{@age}”
end
end
tim = Person.new(name: “Tim”)
tim.printit
Good point TIm. I missed the opportunity to use that trick (probably from starting with Ruby code and only fixing what was broken).
Why is the heuristic logic implemented differently between the Ruby and the Crystal version?
Ruby: COST_STRAIGHT * (dx + dy) + (COST_DIAG – 2 * COST_STRAIGHT) * min(dx,dy)
Crystal: COST_STRAIGHT * max( dx, dy) + COST_DIAG * min(dx, dy)
This indicates that the comparison might not be fair.
Ah, good catch Thomas. I had updated one heuristic but not the other. I’ve since updated the code and reran the comparison and found very similar results.
I also noticed that the PRNG in Ruby and Crystal are not the same.
Therefore, runs with the same seed are different.
Hardcoding the search to [54, 25] -> [155, 28] gives on my laptop:
2.67s Crystal release
90.42s Ruby 2.4.0
That’s still 33.9 times faster, but not 70 times.
Thanks for the comment Benoit. I didn’t draw attention to the different PRNG, but you are correct. I used seeds that caused a similar amount of nodes to be explored.
A better benchmarking approach would be to generate the maps out to some yml file and loaded them from each Ruby and Crystal to get around the issue. I haven’t dug into the joys of importing YAML or JSON into a typed language like Crystal yet. So, the benchmarks that I ran did vary from 50 to 100 times faster depending on the test cases ran.
If anyone in the Crystal community wants to build on this, feel free. I’d love to see the results. For now, I have a few other projects on my plate.
I’m looking forward to try Crystal, but absolutely need Windows support (not for games though) . Windows support for programming languages other than .Net is still a problem, a huge waste of potential ! After 4 year it’s time and otherwise too late I am afraid. And to counter comments, I wish I had the level to contribute but I don’t..
I agree Peter. Crystal has been working on it. You can track the progress here: https://github.com/crystal-lang/crystal/issues/26 and https://www.reddit.com/r/crystal_programming/comments/390qfo/crystal_for_windows/